Digital Twin for your space mission
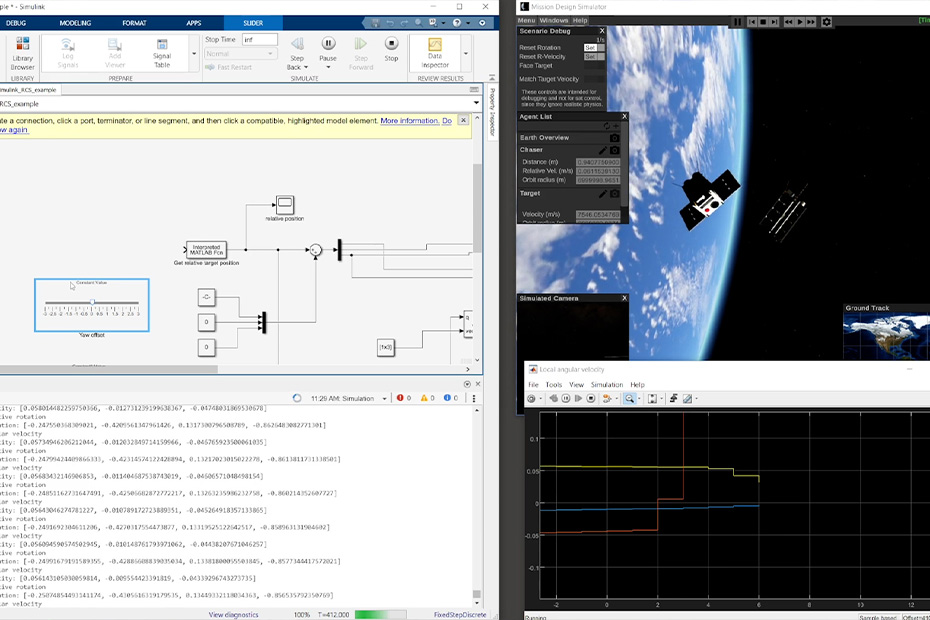
Mission Design Simulator (MDS) is a computationally accurate and photo-realistic space mission design simulator suited for simulating a multitude of complex mission scenarios in space including rendezvous proximity operations (RPO).
The simulator is a comprehensive virtual environment where users can prototype and test their entire space missions using one software package, thus minimizing potential errors as well as reducing development time and costs.
Preliminary mission analysis tools
Combine multi-body dynamics with accurate orbital mechanics to simulate complex missions
Mission analysis in real-time with time scale settings to speed up or slow down the simulation
Change your scenario parameters and see the results straight away
Highly accurate orbit propagation using the Orekit space dynamics library


Space Robotics and Navigation
Tools that facilitate robotic space mission design
- Run navigation and robotics algorithms in real-time
- Multi-body dynamics simulations with orbital mechanics
- Modular instruments for simulating GNC scenarios
- User friendly interface for quick prototyping
- SITL and HITL simulations enabled via language agnostic API
- Flexible dynamics integration

MDS Baker
Generate synthetic image datasets for various space mission scenarios
- Quickly generate image sets and associated labels for model training
- Easily adjust generated scenario parameters through an intuitive UI
Deep Learning and Computer Vision applications
Train and test vision based autonomous systems for space operations
True scale visually accurate celestial bodies creating a representative environment
Dynamic lighting in simulation scenarios with modeled optics parameters such as FOV and camera distortions
Ray tracing for advanced optical accuracy
Run real-time inference for testing the trained models


A comprehensive tool
Seamless integration into existing development and testing pipelines
- 3D Model importer/exporter
- JSON configuration files (orbits, instruments, robotics)
- Mission scenario ephemerides export
- Language agnostic API for effective integration into existing pipelines for SITL and HITL simulations